KAPITEL 2
|
212b 8.
Efter at disse ting er afklaret, lad os da nřje overveje selve bevćgelsen af hjulene. Forřges ζ med dζ sĺ lad os undersřge, hvor meget η i mellemtiden vokser. Dette gřres bekvemt ved at benytte ligningen ccosω = r + s + pcosΦ + qcosΨ. Denne ligning er bevist som ligning (5) pĺ side 210 i kapitel 1. Ved differention af ligningen fĺs, at -cdωsinω = dr + ds +dpcosΦ-pdΦsinΦ + dqcosΨ-qdΨsinΨ. Men dr = -dpcosΦ, se řverst pĺ side 211b i kapitel 1 og og ds = -dqcosΨ hvoraf cdωsinω = pdΦsinΦ + qdΨsinΨ, hvorfra, nĺr csinω = psinΦ + qsinΨ, (Denne ligning stammer fra (1), side 210.) det vil gćlde, at 0 = (dΦ - dω)psinΦ + (dΨ - dω)qsinΨ Men dω - dΦ = dζ og dΨ - dω = dη. Dette fřlger af * i kapitel 1 side 208. Heraf fřlger, at pdζsinΦ = qdηsinΨ eller
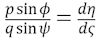
Altsĺ holder η´s og ζ ´s indbyrdes ćndringer det samme forhold som de momenter, der skyldes trykket Π. (Se nederst pĺ side 209 i Kapitel1.) | Figuren stammer fra Kapitel l. Vi forklarer her, hvad figuren forestiller. A og B er centre for to tandhjul A og B med henholdsvis a og b tćnder. Punktet T ligger sĺdan, at TA/TB = a/b. Kurven EOM er den ene side af en tand pĺ tandhjulet med centrum A. Nĺr hjulene drejer har stangen AE konstant lćngde; det symboliserer at tanden sidder fast pĺ tandhjulet med centrum A. Pĺ samme mĺde er kurven FON den ene side af en tand pĺ tandhjulet med centrum B. Nĺr hjulene drejer har stangen BF har konstant lćngde; det symboliserer at tanden sidder fast pĺ tandhjulet med centrum B. De to tćnder rřrer hinanden punktet O. Man kan bevise, at nĺr tandformerne er sĺdan, at begge tandhjul drejer sig med konstant vinkelhastighed, sĺ vil fćllesnormalen til tćnderne i punktet O gĺ gennem det faste punkt T. Dette resltat nĺede Euler frem til i afsnit 4. De 4 linjestykker AT, BT, AE og BF har konstante lćngder. Alle de andre linjestykker, AP, PO, PE, BQ, QO, QF og TP, har varierende lćngder nĺr tandhjulene drejer. Alle vinkler er variable. |
|
9. Nu břr vi opnĺ, at dette forhold vedholdende er konstant, eller at en konstant vinkelhastighed for hjulet A holder vinkelhastigheden for hjulet B konstant. Da altsĺ forholdet psinΦ : qsinΨ mĺ vćre konstant, sĺ vil punktet T vćre fast. Sćttes AT = a og BT = b vil c = a + b. Derfor vil psinΦ = asinω og qsinΨ = bsinω.
Heraf fřlger, efter at vi har set bort fra gnidningen, at hvis vi kalder det moment, som fĺr hjulet A til at bevćge sig, for M, sĺ vil momentet pĺ det andet hjul vćre
b/a·M. Men sĺ vil forholdet mellem vinkelhastighederne vćre
| Det undrer mig stadigvćk, at Euler inddrager begrebet moment i sine overvejelser |
|
10. Derfor vil det vćre sĺdan, at hvis tandformen EOM er givet, sĺ vil det andet hjul FON´s form og position vćre bestemt. For lad os antage, at det for tandformen EOM gćlder, at der findes en ligning mellem afstanden AP = p og vinklen EPO = Φ hvoraf PO = r = b - ∫dpcosΦ, og herudfra findes vinklen ω straks idet sinω = psinΦ/a. Lad nemlig AT = a fřjes til linjen OP. Da dette kan gřres pĺ to mĺder, fĺr man to vćrdier af ω, den ene spids og den anden stump ved hvilket ζ = ω - Φ. (Jeg forstĺr ikke ovennćvnte integration.) Sĺ ud fra den rette linje AT ´s position, nĺr man antager at AB = a + b = c, sĺ vil det andet hjuls centrum B og fremdeles qsinζ = bsinω = bpsinΦ/a. Men da der ogsĺ gćlder, at qcosΨ = ccosω - r - s - pcosΦ, men det vil ogsĺ gćlde, at ds = -dqcosΨ. Eller nĺr det gćlder, at adζ = bdη eller cdω = adΦ + bdΨ eftersom ζ = ω - Φ og η = Ψ - ω sĺ vil aΦ + bΨ = cε + cω, hvor ε betegner en vis konstant vinkel, der kan vćlges vilkĺrligt; hvorfra man definerer vinklen FQO = Ψ = (cε + cω - aΦ)/b eller η = (cε + aω - aΦ)/b =(cε aζ)/b; Og sĺledes bestemmes positionen af den rette linje BF i hvilken BQ = q =(bpsinΦ)/asinΨ. Men ud fra punktet Q, som ogsĺ den rette linje TPO angiver, erkendes tandpunktet O pĺ tandformen FON. | I afsnit 10 beskćftiger Euler sig for fřrste gang med formen pĺ de to kurver EOM og FON. Euler beviser her, at kurven EOM kan vćlges vilkĺrligt, og at man derefter kan beregne formen af FON sĺledes, at de to kurver hele tiden rřrer ved hinanden, nĺr hjulene drejer hele vejen rundt. Nĺr man skal konstruere tandhjul, skal man kun bruge smĺ stykker af de kurver, som Euler beskriver. Det vender han senere tilbage til. |
|
11. Nu vil vi ud fra et vilkĺrligt punkt O pĺ tanden EOM konstruere det tilsvarende punkt pĺ tanden FON. Og da vi betragter en bevćgelse der varer et kort tidsrum, sĺ vil det for elementet Oo pĺ den fřrste tand vćre muligt at bestemme elementet Oω pĺ den anden tand. Til det formĺl skal vi bruge Oω´s krumningsradius, som vi har fundet ovenfor. Krumningsradius er
Ifřlge figuren i afsnit 9 gćlder ogsĺ, at
Ved differentiation af denne formel fĺr man, at d(qsinψ) = (b/a)(dpsinφ - pdφcosφ), sĺledes at krumningsradius er
Men eftersom dψ = (cdω - adφ)/b og dωcosω = (d·psinφ)/a vil vi fĺ, at
og den sřgte krumningsradius er derfor
Men den givne kurve EOM´s krumningsradius i i O er
hvoraf r + s + pcosφ + qcosψ = ccosω. Summen af de to krumningsradier er derfor
| Formlen for krumningsradius fĺs af formlen for VO i afsnit 6 ved at "oversćtte" den fra hjulet med centrum A til hjulet med centrum B. |
|
12. Fordi den rette linje BF´s position ikke influerer pĺ tandformen, men kan antages efter et skřn, nĺr formen er givet, ligesom den ogsĺ kan forstĺs skřnsmćssigt ud fra den konstante vinkel ε, sĺ vil det vćre tilstrćkkeligt, nĺr man har fjernet den rette linje helt fra sammenhćngen, at have noteret sig střrrelsen af krumningsradius OQ, hvoraf ogsĺ pĺ grund af at s + q cosψ = ccosω-r - pcosφ, střrrelserne q og s med vinklen ψ gĺr ud af regningerne, sĺledes at den nćvnte krumningsradius er
Efter at denne střrrelse er kendt og fordi den rette linje TPO´s position er fast, sĺ vil, nĺr denne linje er forlćnget ud over O, sĺ vil denne střrrelse have Q som centrum; ud fra dette kan en lille cirkelbue beskrevet ved hjćlp af radius QO give en passende tandform FON. I de fřlgende eksempler vil vi beskrive og bestemme disse tandformer | Kommentarer |